近年来,侦察型机器人朝着柔性化与小型化的方向发展,为了提升其对复杂多变的工作环境的适应性,亟需研发与之相应的小尺度柔性传感元件。基于微纳裂纹的柔性应变传感器由于灵敏度优异,在构建小尺度柔性传感系统方面具有良好的应用前景。然而,此前通过静态预过载的方式在传感层中引入裂纹,常常需要牺牲传感器的循环稳定性来获得通道裂纹形貌,从而使传感器面临着难以兼具小应变下高灵敏度和高循环稳定性的挑战。
为了解决这一问题,近日,中国科学院金属研究所沈阳材料科学国家研究中心的张广平团队在前期柔性基底金属薄膜力学性能研究(Acta Mater.,2006;Nat. Commun.,2014;Acta Mater.,2024)和基于微纳裂纹的柔性应变传感器研究(Adv. Mater. Technol.,2021;Adv. Func. Mater.,2023)的基础上,提出一种基于超大累积预应变的裂纹式传感器制备策略。团队通过预疲劳加载方式在膜基结合力强且延展性好的聚酰亚胺基底金薄膜中制备了高密度通道裂纹,制备了一种在小应变下同时具有高灵敏度和高循环稳定性的柔性应变传感器,其灵敏度因子高达5798(1.2%< <2.3%),稳定响应周次为15000周次,与通过传统预过载方法所制备的传感器相比具有明显优势。
<2.3%),稳定响应周次为15000周次,与通过传统预过载方法所制备的传感器相比具有明显优势。
随后,基于上述疲劳裂纹柔性应变传感器,团队进一步构建了具有悬臂梁结构的叶片状力学传感器以用作机器人的“传感尾巴”,实现了机器人的环境感知与运动监测等功能。叶片状传感器能够检测0.93-11.9 m/s的气流,响应时间低至0.28 s,具有风向识别功能,同时在水下环境中也表现出良好的水流检测能力。将叶片状传感器固定在四足机器人上,传感器的电阻响应曲线有效了反映机器人的步态信息,所搭建的机器人运动状态实时监测系统有望在将来实现步态自动识别、步态稳定性分析、以及地形分析等功能。
上述研究结果以“Fatigue crack-based strain sensors achieving flow detection and motion monitoring for reconnaissance robot applications”为题,在Materials Horizons上进行了详细报道。论文的第一作者为吴绪苹博士,通讯作者为罗雪梅项目研究员和张广平研究员,东北大学材料科学与工程学院张滨教授团队参与了本论文的研究工作。
该项工作得到了国家自然科学基金、中国科学院战略性先导科技专项和金属研究所“引进优秀学者”项目的资助。
全文链接: https://doi.org/10.1039/D4MH00419A
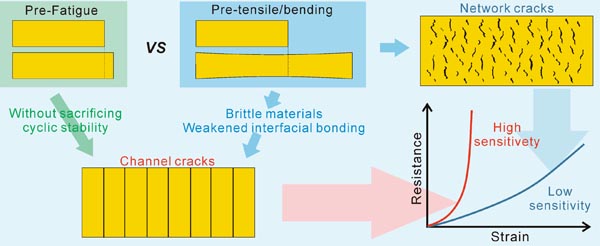
图1 预疲劳与传统预过载方式制备裂纹式柔性应变传感器的对比
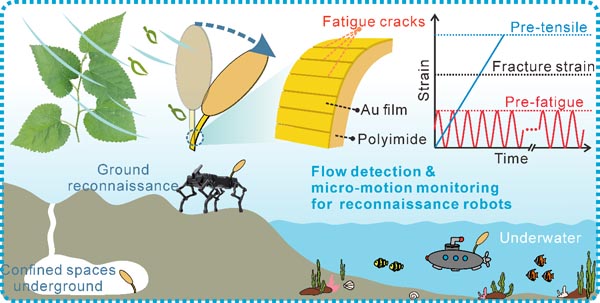
图2 侦察型机器人的叶片状“智能尾巴”及其应用
